HOOPBOT – Robot jeżdżący po ścianach
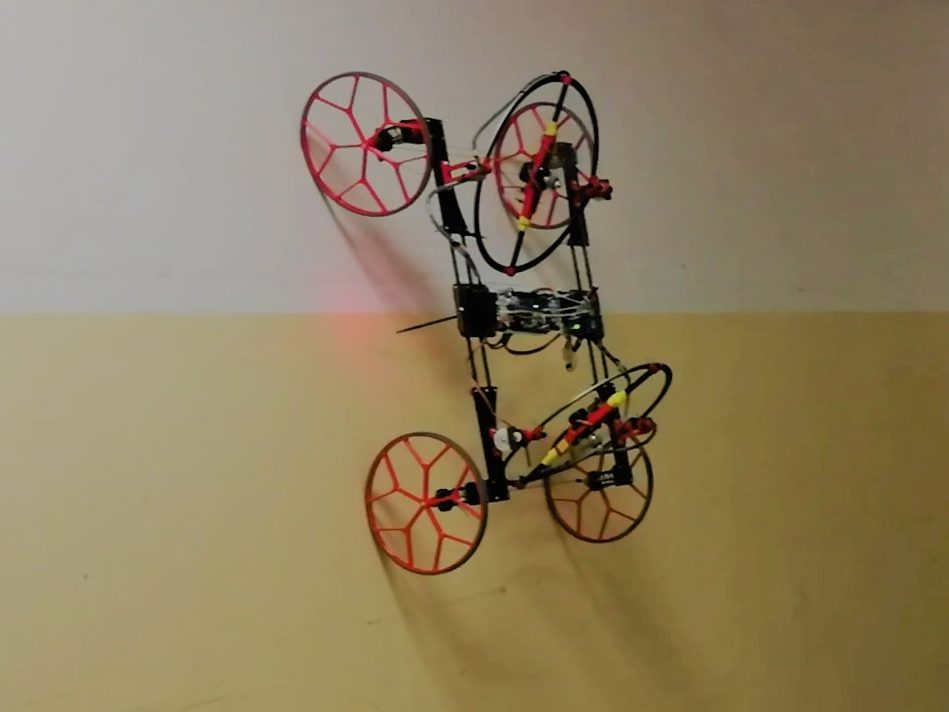
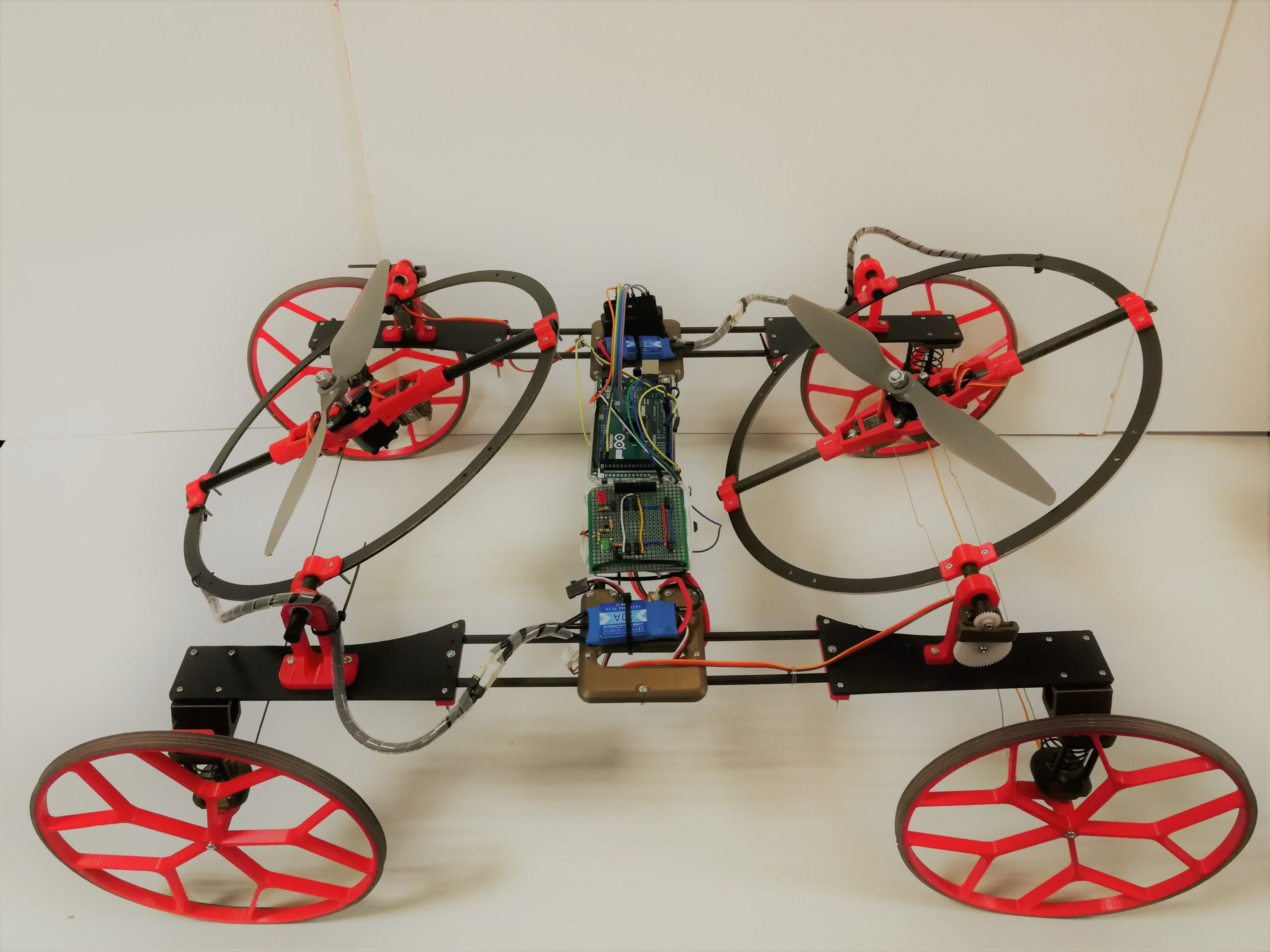
Robot został zbudowany w ramach pracy dyplomowej przez jednego z członków naszego stowarzyszenia i został wykonany w naszym warsztacie. Jest to pierwsza iteracja konstrukcji, wzorowana na robocie VertiGo – grupy Disney Reaserch. Konstrukcja wykorzystuje zjawisko adhezji powietrznej, to znaczy siła trzymająca na ścianie jest generowana za pomocą śmigieł.
Aby możliwe było utrzymanie się na ścianie robot musiał zostać zbudowany z lekkich materiałów konstrukcyjnych. Do jego budowy wykorzystano włókno węglowe, elementy wykonane w technologii druku 3D oraz aluminium.
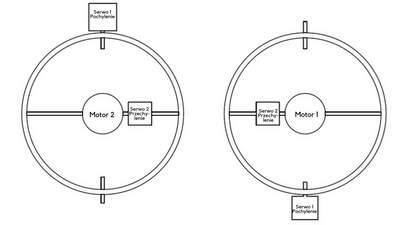
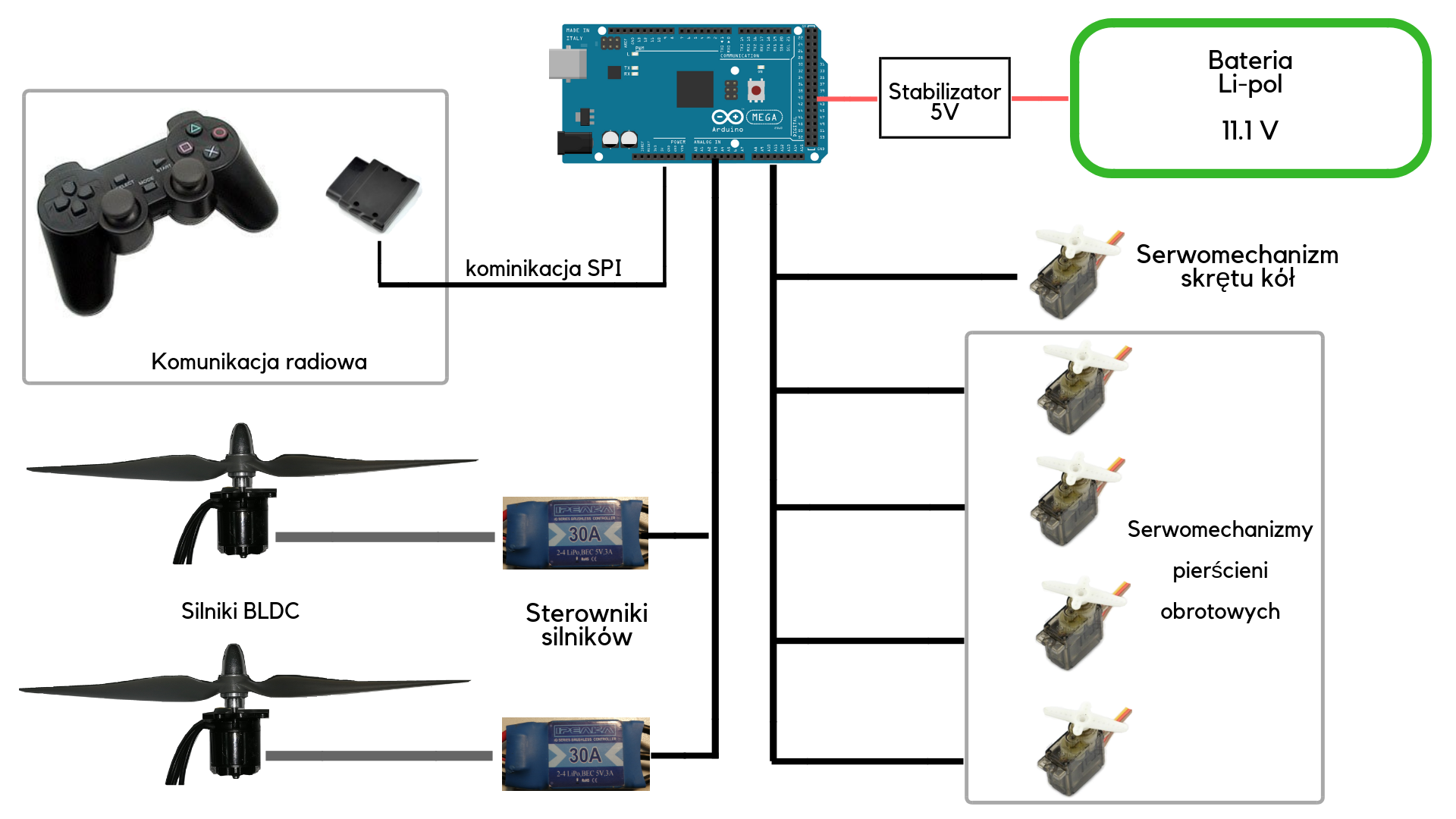
Konstrukcja posiada 2 pierścienie ze śmigłami, każde ze śmigieł docelowo miało posiadać 2 stopnie swobody, dające duże możliwości regulacji siły dociskającej. Silniki BLDC za pośrednictwem 10 calowych śmigieł generują łącznie siłę ponad 2kg. Mózgiem zarządzającym jest 8-bitowa ATmega2560, w którą wyposażona jest płytka prototypowa Arduino Mega. Wybór tej wersji z płytek Arduino został podyktowany dostępną ilością wyjść typu PWM. Projekt zakładał sterowanie każdego efektora wypełnieniem impulsu, stąd wykorzystane miało zostać 7 z 15 wyjść tego typu.
Sterowanie robota odbywa się w sposób bezprzewodowy za pomocą gotowego zestawu radiowego nadajnik- odbiornik. Całkowita masa robota wynosiła 1150g. Do tej pory udało się zrealizować cel aby robot był w stanie samodzielnie utrzymać się na ścianie.Testy rozpoczęto od ustawiania robota na drewnianej płycie nachylonej pod kątem ok. 45. Po każdej pozytywnej próbie zwiększano kąt między podłogą i płytą. Ostatnim etapem testu było przyłożenie robota do niedoskonałej, wewnętrznej ściany budynku, co prezentuje jedno ze zdjęć.
Motywacja do wykonania takiej konstrukcji:
Powierzchnie pionowe oraz nachylone pod kątem do powierzchni poziomej stanowią niebezpieczne miejsca pracy dla człowieka. Wraz z wysokością niebezpieczeństwo wzrasta. Rozwój technologii spowodował, z˙e budynki, mosty, statki oraz inne konstrukcje stają się większe z każdą dekadą. Potężne konstrukcje podlegają˛ częstej kontroli. Drobne pęknięcia czy ogniska korozji mogą naruszać strukturę konstrukcji i nieść za sobą konsekwencje w postaci katastrof lub drogich napraw. Roboty zdolne do poruszania się po ścianach mogą zastąpić człowieka podczas inspekcji i konserwacji. Wykonując zadanie precyzyjnie, powtarzalnie i bez narażania ludzkiego życia. Specjalistyczne czujniki zamieszczone na robocie mogą zlokalizować nieprawidłowości na wczesnym etapie.
Projekt VertiGo:
Paul Beardsley, R Siegwart, M Arigoni, M Bischoff, S Fuhrer, D Krummenacher, D Mammolo, and R Simpson. Vertigo-a wall-climbing robot including ground-wall transition. Disney Research, 2015.
Po więcej informacji zapraszamy do kontaktu.
ROBOT JTR
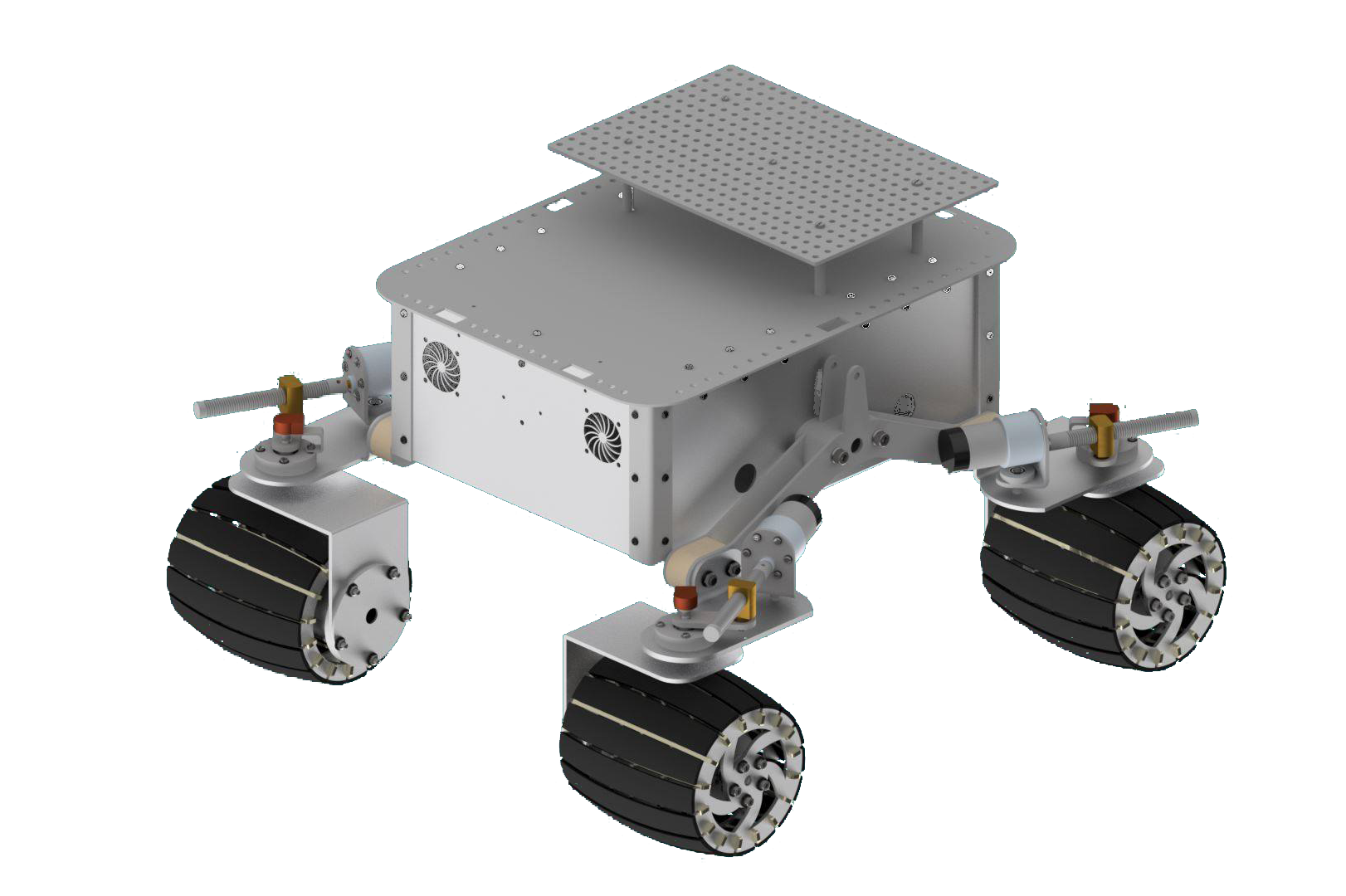
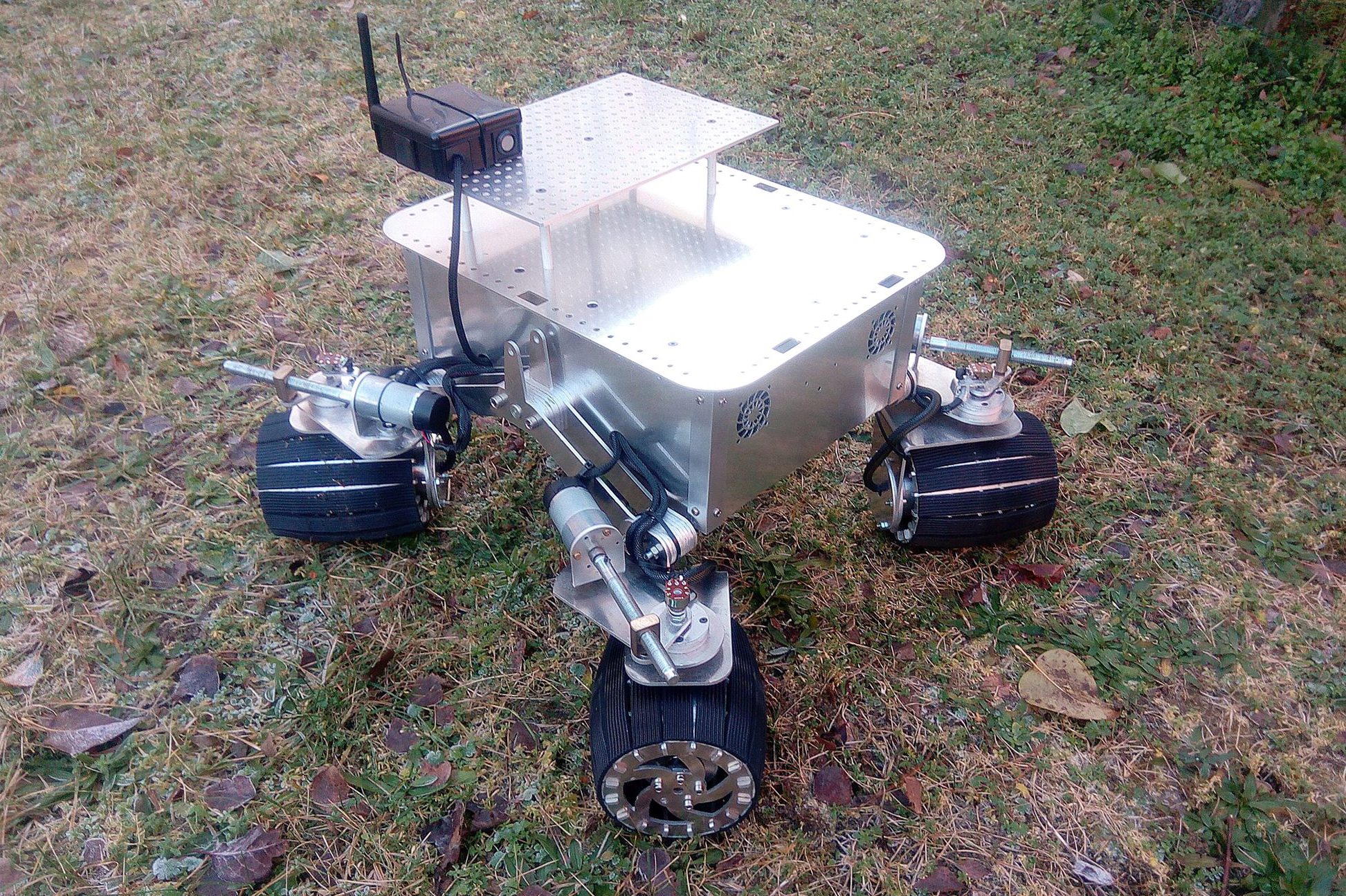
Jednomaszynowy Tabor Łazików jest robotem mobilnym, którego docelowym zastosowaniem jest wspomaganie zadań inspekcyjnych, polegających na przeprowadzaniu objazdów z aparaturą pomiarową w niebezpiecznym dla człowieka terenie – np. mobilna diagnostyka termowizyjna na terenie stacji elektroenergetycznych.
Cechą wyróżniającą konstrukcję łazika jest układ niezależnego skrętu kół, ułatwiający mu realizację ruchu na zróżnicowanym podłożu. Projekt powstał w ramach projektu inżynierskiego jednego z członków naszego stowarzyszenia. Obecnie trwają pracę nad zwiększeniem autonomiczności robota m.in. z wykorzystaniem przetwarzania obrazu jego otoczenia. Jeżeli jesteś zainteresowany dołączeniem do zespołu JTR, skontaktuj się z nami.
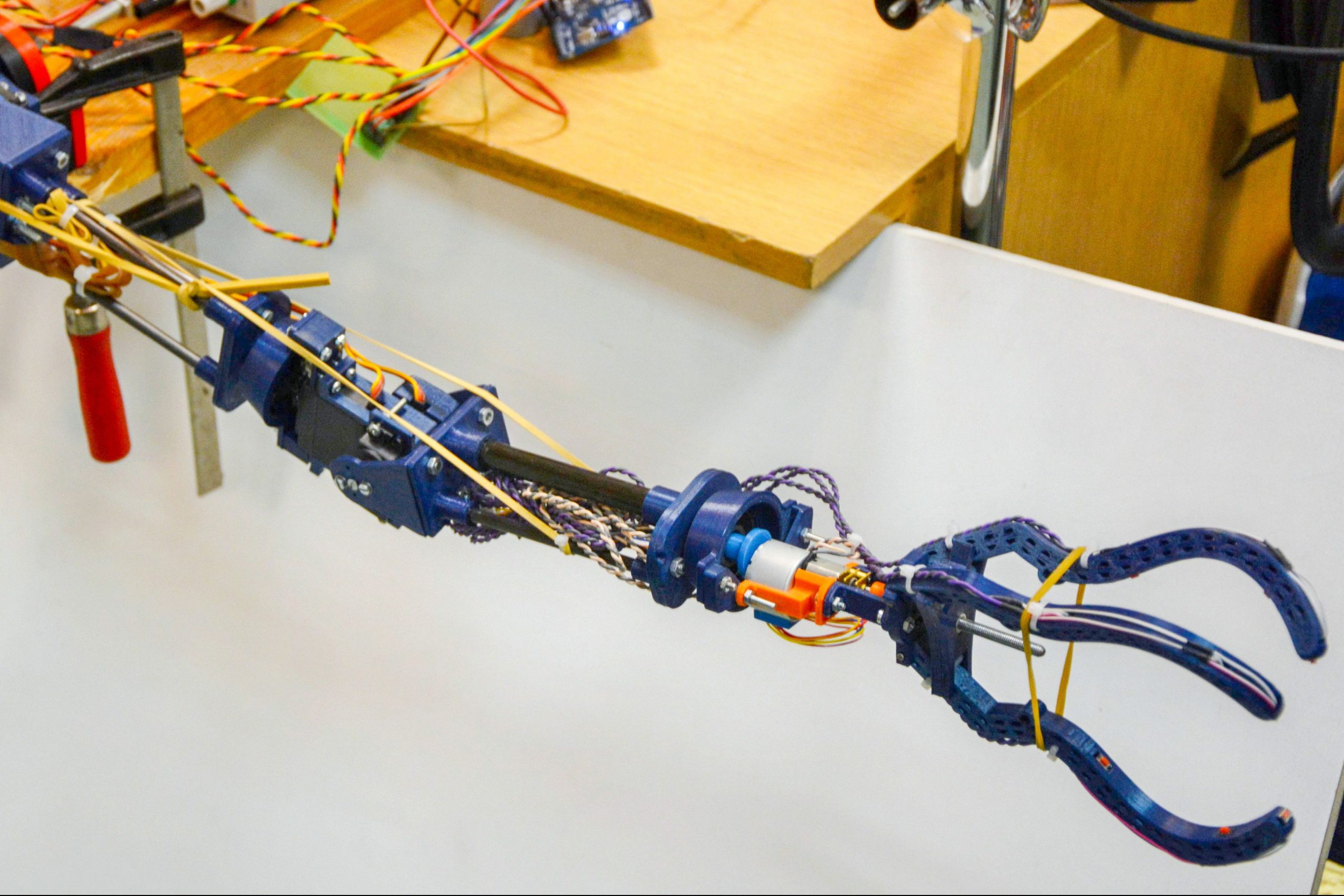
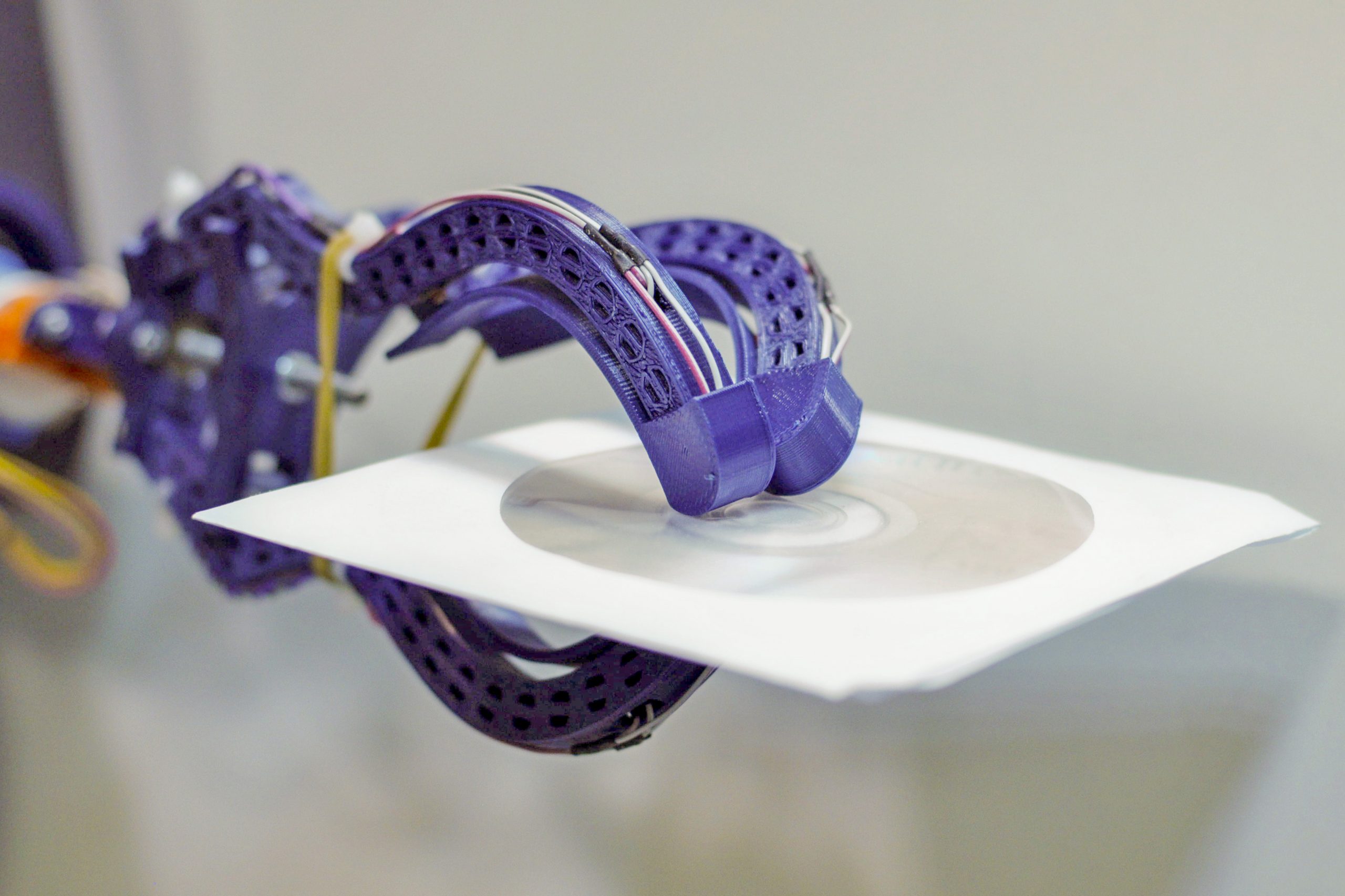
PROTEZA RAMIENIA STEROWANA BIOSYGNAŁAMI
Projekt zakładał analizę możliwości zbudowania protezy ramienia sterowanej za pomocą sygnałów EEG, EMG oraz EyeTrackingu. W ramach projektu powstał prototyp protezy składający się z części wydrukowanych na drukarce 3D, sterownika opartego na płytce Arduino oraz serwomechanizmów i małych lekkich silniczków DC.
Za sterowanie protezą odpowiedzialne było oprogramowanie wykorzystujące algorytmy kinematyki odwrotnej. Jako źródło sygnałów sterujących wykorzystano: moduł EyeTrackingu śledzący ruch gałek ocznych (do określenia docelowego punktu w przestrzeni), 16-elektrodowy moduł elektroencefalograficzny (do generowania sygnału woli ruszenia ręką) oraz moduł do pomiaru elektromiografii (do precyzyjnego ułożenia i zaciśnięcia chwytaka na wybranym przedmiocie). Projekt powstał w ramach pracy magisterskiej realizowanej przez członka naszego stowarzyszenia.
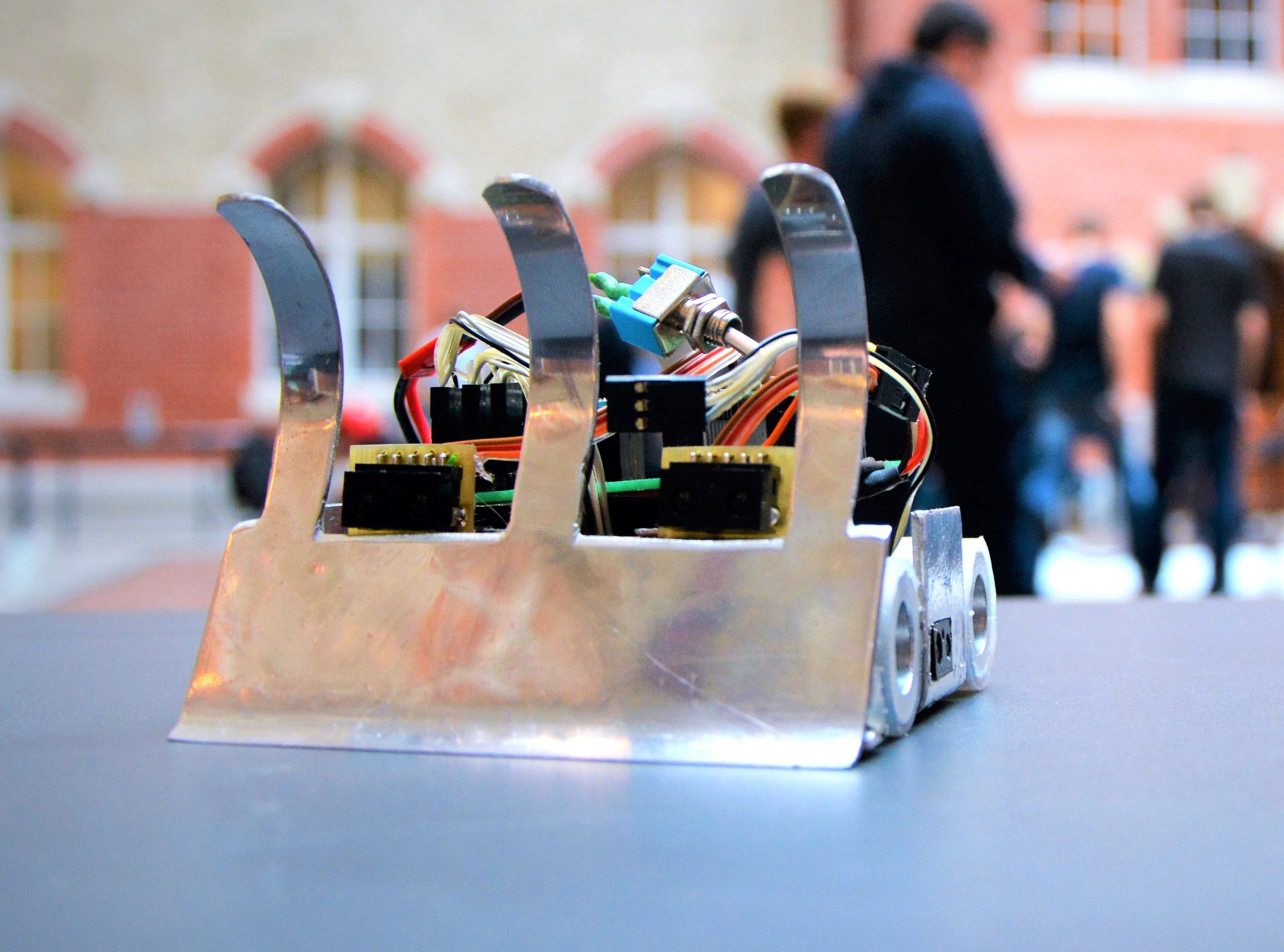
MINI SUMO
Absolwent to robot klasy minisumo. Wyposażony jest w 4 silniki sterowane za pośrednictwem pojedynczych kanałów mostków H. Oczami robota są trzy czujniki podłoża oraz 4 cyfrowe czujniki odległości.
Odpowiednie rozmieszczenie czujników umożliwia bardzo szerokie pole widzenia robota. Mózgiem umożliwiającym autonomię robota jest mikrokontroler Arduino Nano.
Rama robota to aluminiowa blacha. Mocowania silników oraz felgi zostały wykonane w technologii obróbki skrawaniem. Dla zapewnienia doskonałej przyczepności robota podczas walki opony zostały odlane z silikonu. Elementem, który ma podważyć i zepchnąć przeciwnika z ringu jest lemiesz. Jest to jego druga iteracja. W wersji pierwszej był to element nieruchomy, w kolejnej wersji został zamontowany tak aby zapewniać idealną powierzchnię styku z podłożem oraz zyskał ‘rogi’ aby uniemożliwić przeciwnikowi najechanie na naszego robota.
Robot został zbudowany przez jednego z naszych członków i brał udział w licznych turniejach robotycznych.