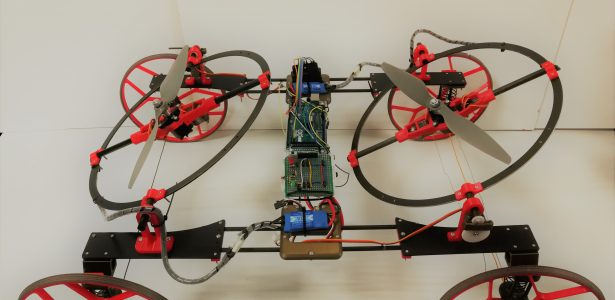
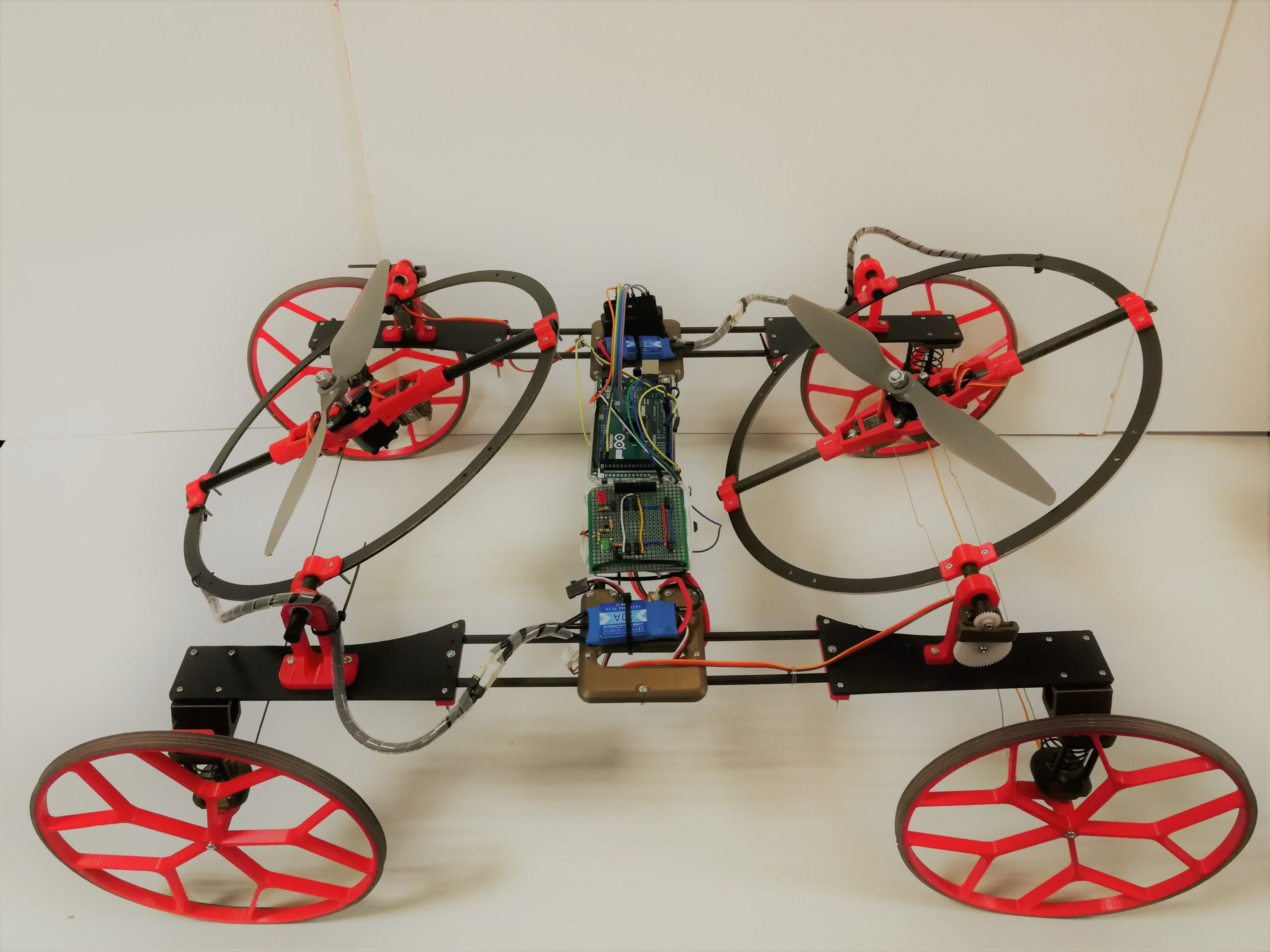
Robot został zbudowany w ramach pracy dyplomowej przez jednego z członków naszego stowarzyszenia i został wykonany w naszym warsztacie. Jest to pierwsza iteracja konstrukcji, wzorowana na robocie VertiGo – grupy Disney Reaserch. Konstrukcja wykorzystuje zjawisko adhezji powietrznej, to znaczy siła trzymająca na ścianie jest generowana za pomocą śmigieł.
Aby możliwe było utrzymanie się na ścianie robot musiał zostać zbudowany z lekkich materiałów konstrukcyjnych. Do jego budowy wykorzystano włókno węglowe, elementy wykonane w technologii druku 3D oraz aluminium.
Konstrukcja posiada 2 pierścienie ze śmigłami, każde ze śmigieł docelowo miało posiadać 2 stopnie swobody, dające duże możliwości regulacji siły dociskającej. Silniki BLDC za pośrednictwem 10 calowych śmigieł generują łącznie siłę ponad 2kg. Mózgiem zarządzającym jest 8-bitowa ATmega2560, w którą wyposażona jest płytka prototypowa Arduino Mega. Wybór tej wersji z płytek Arduino został podyktowany dostępną ilością wyjść typu PWM. Projekt zakładał sterowanie każdego efektora wypełnieniem impulsu, stąd wykorzystane miało zostać 7 z 15 wyjść tego typu.
Sterowanie robota odbywa się w sposób bezprzewodowy za pomocą gotowego zestawu radiowego nadajnik- odbiornik. Całkowita masa robota wynosiła 1150g. Do tej pory udało się zrealizować cel aby robot był w stanie samodzielnie utrzymać się na ścianie.Testy rozpoczęto od ustawiania robota na drewnianej płycie nachylonej pod kątem ok. 45. Po każdej pozytywnej próbie zwiększano kąt między podłogą i płytą. Ostatnim etapem testu było przyłożenie robota do niedoskonałej, wewnętrznej ściany budynku, co prezentuje jedno ze zdjęć.
Motywacja do wykonania takiej konstrukcji:
Powierzchnie pionowe oraz nachylone pod kątem do powierzchni poziomej stanowią niebezpieczne miejsca pracy dla człowieka. Wraz z wysokością niebezpieczeństwo wzrasta. Rozwój technologii spowodował, z˙e budynki, mosty, statki oraz inne konstrukcje stają się większe z każdą dekadą. Potężne konstrukcje podlegają˛ częstej kontroli. Drobne pęknięcia czy ogniska korozji mogą naruszać strukturę konstrukcji i nieść za sobą konsekwencje w postaci katastrof lub drogich napraw. Roboty zdolne do poruszania się po ścianach mogą zastąpić człowieka podczas inspekcji i konserwacji. Wykonując zadanie precyzyjnie, powtarzalnie i bez narażania ludzkiego życia. Specjalistyczne czujniki zamieszczone na robocie mogą zlokalizować nieprawidłowości na wczesnym etapie.
Projekt VertiGo:
Paul Beardsley, R Siegwart, M Arigoni, M Bischoff, S Fuhrer, D Krummenacher, D Mammolo, and R Simpson. Vertigo-a wall-climbing robot including ground-wall transition. Disney Research, 2015.
Po więcej informacji zapraszamy do kontaktu.







You must be logged in to post a comment.