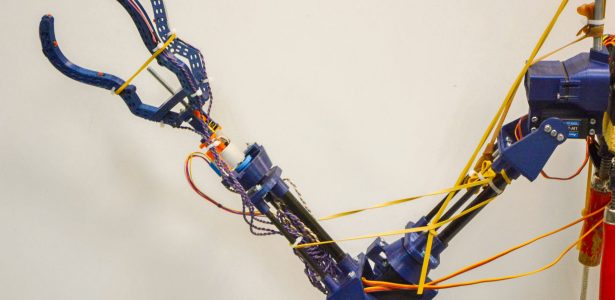

Projekt zakładał analizę możliwości sterowania protezą ramienia za pomocą sygnałów EEG (elektroencefalografii), EMG (elektromiografii) oraz EyeTrackingu (śledzenia ruchu gałek ocznych). W ramach projektu powstał prototyp protezy składający się z części wydrukowanych na drukarce 3D, sterownika opartego na płytce Arduino oraz serwomechanizmów i małych lekkich silniczków DC.
Za sterowanie protezą odpowiedzialne było oprogramowanie wykorzystujące algorytmy kinematyki odwrotnej. Jako źródło sygnałów sterujących wykorzystano: moduł EyeTrackingu śledzący ruch gałek ocznych (do określenia docelowego punktu w przestrzeni), 16-elektrodowy moduł elektroencefalograficzny (do generowania sygnału woli ruszenia ręką) oraz moduł do pomiaru elektromiografii (do precyzyjnego ułożenia i zaciśnięcia chwytaka na wybranym przedmiocie). Proteza została zaprojektowana w taki sposób, aby posiadać pełną funkcjonalność ludzkiego ramienia, zachować wymiar odpowiadający rozmiarowi ręki osoby dorosłej przy zachowaniu niskiej masy i małej bezwładności ruchu. Elementy prototypu protezy zostały wykonane z części wydrukowanych na drukarce 3D w technologii FDM oraz włókna węglowego. Dodatkowo do ramienia dodane zostały gumy modelarskie, które symulując mięśnie wspomagały ruchy protezy przy zginaniu w stawach. Ramię zostało wyposażone w funkcjonalny trójpalczasty chwytak z czujnikami nacisku. Do sterowania silnikami oraz obsługi czujników wykorzystany został mikrokontroler Arduino, który komunikował się z aplikacją do akwizycji i analizy sygnałów biomedycznych.
Projekt powstał w ramach pracy magisterskiej realizowanej przez członka naszego stowarzyszenia.




You must be logged in to post a comment.